|
|
||
|---|---|---|
| src/perception | ||
| .gitignore | ||
| README.md | ||
| data.ipynb | ||
README.md
AutoETS2
A ADAS(Advanced Driver Assistance System) for Euro Truck Simulator 2 (or American Truck Simulator) with Deep Learning and Automation Algorithms
Plan
- LCC(Lane Centering Control) + LDW(Lane Departure Warning) + ALC(Auto Lane Change)
- TSR(Traffic Signs Recognition) + TJA(Traffic Jam Assistant)
- LCW(Lane Changing Warning) + FCW(Forward Collison Warning)
- NOA(Navigate on Autopilot)
Modules
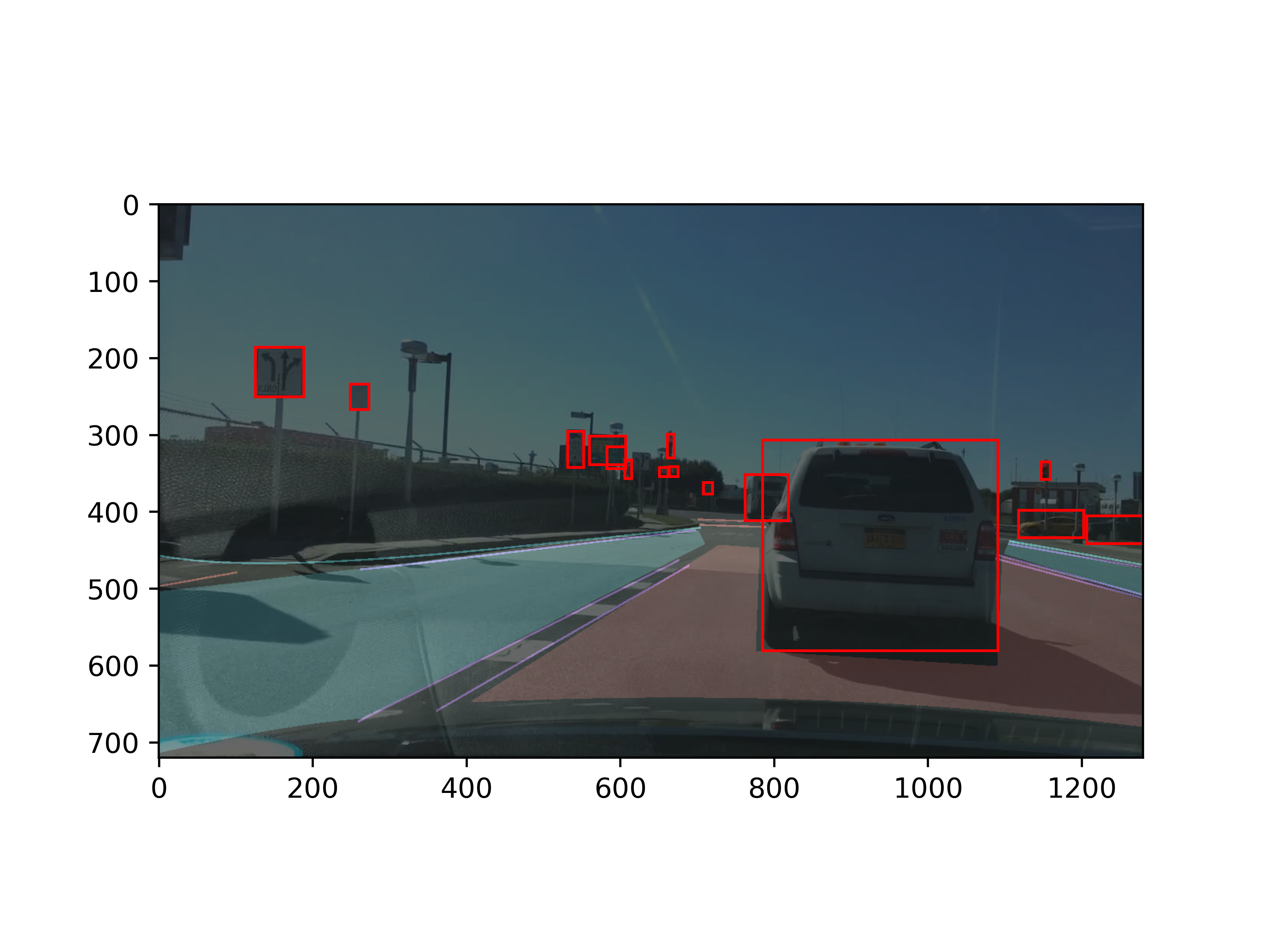
- Drivable Space Detection + Lane Detection + Object Detection (Perception)
- Automatic control system + Decision system (Behaviour)
Datasets
- BDD100K - A diverse driving dataset for heterogeneous multitask learning
- Multi-object Detection
- Lane Detection
- Drivable Area Segmentation
- ETS2SCDataset - Euro Truck Simulator 2 Captured Screen and Input
- This dataset contains recorded screen of Euro Truck Simulator 2 and paired input from Steering wheel controller (Thrustmaster Ff430).
- Dataset contains 323894 frames captured at 25fps.
- Each frame is paired with steering wheel controller input values at that moment
- Using Europilot
Data Directory Structure:
(BDD100k dataset)
├── image
│ └── 100k
│ ├── test
│ ├── train
│ └── val
└── label
├── det_20
├── drivable
│ ├── colormaps
│ │ ├── train
│ │ └── val
│ ├── masks
│ │ ├── train
│ │ └── val
│ ├── polygons
│ └── rles
└── lane
├── colormaps
│ ├── train
│ └── val
├── masks
│ ├── train
│ └── val
└── polygons